Примеры настройки аппаратуры MC04-DSL-3U
Передача RS-232 через плату PD-04
Данное руководство подходит для передачи данных RS-232, RS-422, RS-485. Для передачи данных нужно установить субмодуль (R232, R422, R485) с требуемым интерфейсом на каждой плате PD-04. Все настройки аналогичны.
Задача: передать данные по интерфейсу RS-232 между двумя устройствами.
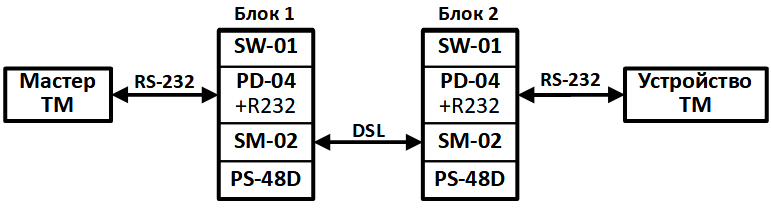
Схема:

| IP-адрес | Синхронизация TDM | |
| Блок 1 | 192.168.20.40 | Freerun |
| Блок 2 | 192.168.20.41 | Auto -> Locked |
| SM-02 | PD-04 | |
| Блок 1 | Слот 5 | Слот 11 |
| Блок 2 | Слот 2 | Слот 5 |
Мы рассмотрим настройку типовой схемы «точка-точка» с передачей данных по интерфейсу RS-232 между Мастером телемеханики и Устройством телемеханики.
Первый блок работает в автоколебательном режим (Freerun), второй – в автоматическом (Auto). Настройка синхронизации TDM второго блока будет ниже.
Пример I
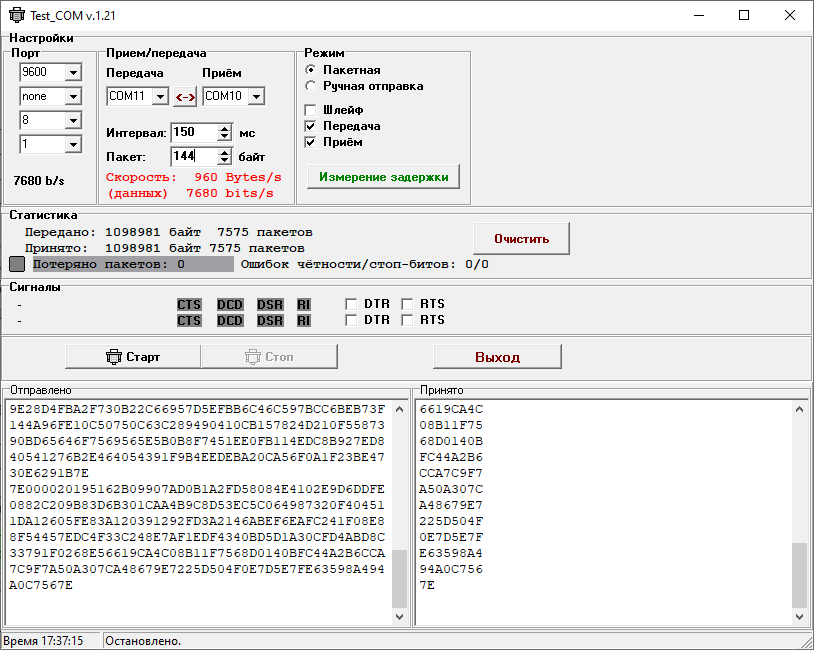
Рассмотрим случай, когда устройства телемеханики работают на скорости 9600 бод и не задействуют сигналы управления.
1. Настройка PD-04
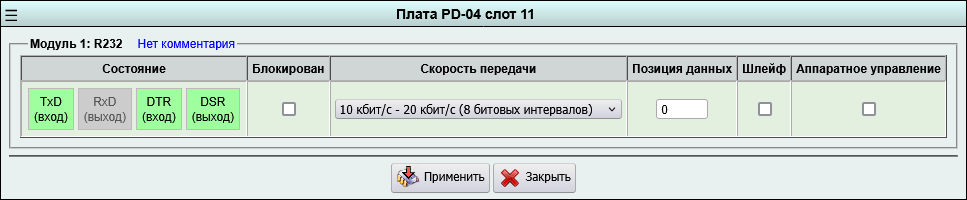
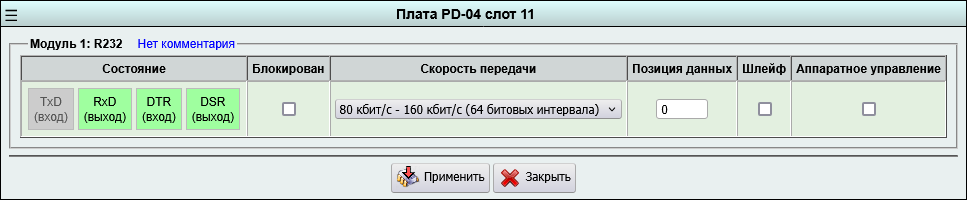
Для начала настроим плату PD-04 с субмодулем R232. Для этого выберем PD-04 в списке плат и нажмем на нее.
В появившемся окне:
- Включить субмодуль, сняв галочку «Блокирован».
- «Скорость передачи» – выбрать «10-20 кбит/с (8 битовых интервалов)».
Скорость передачи зависит от битовых интервалов, которые соответствуют канальным интервалам в таблице TDM. 8 битовых интервалов – это один канальный интервал; 16 битовых интервалов будут занимать 2 канальных интервалов, и так далее.
В этом примере устройства телемеханики работают на скорости 9600 бод, что для платы PD-04 соответствует скорости 9600 бит/с.
- В поле «Позиция данных» написать 0. Этот параметр устанавливает положение первого бита данных на TDM-шине блока (более подробно можно прочитать в Руководстве по эксплуатации).
- Снять галочки «Шлейф» и «Аппаратное управление». Шлейф заворачивает данные, аппаратное управление в этом примере не используется.

2. Настройка SM-02
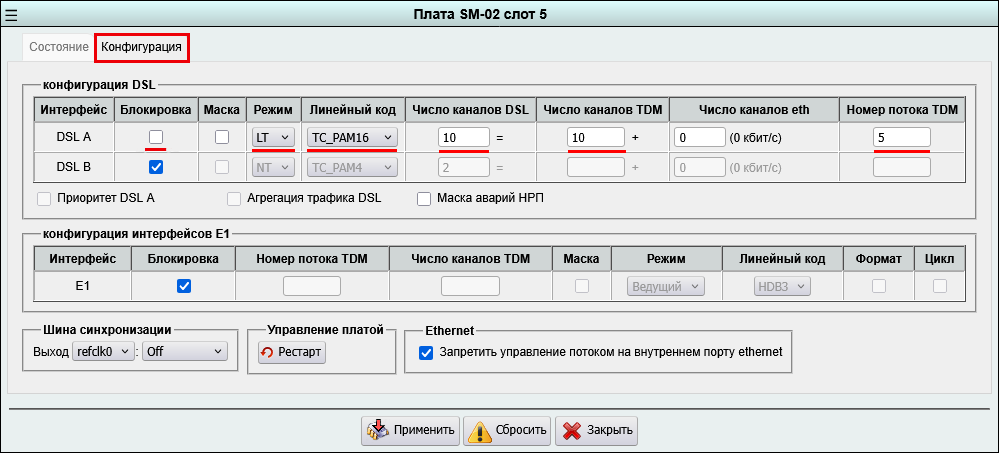
Так же находим SM-02, нажимаем на нее и переходим на вкладку «Конфигурация». В строчке «DSL A»:
- Убираем галочку «Блокировка», чтобы включить пару А. В нашем примере большой пропускной способности канала не понадобится, поэтому можно ограничиться одной парой.
- В столбце «Режим» выбираем «LT». На SM-02 DSL работает в режиме «ведущий – ведомый», соответственно на одной плате будет режим «ведущий», на другой – «ведомый». LT – ведущий, NT – ведомый.
- «Линейный код» выбираем «TC_PAM16».
- В поле «Число каналов DSL» указать 10.
- В поле «Номер потока TDM» можно указать любой свободный поток E1 из таблицы TDM с 5 по 32.
- В поле «Число каналов TDM» так же указать 10.
Остальные настройки можно оставить по умолчанию.
Конфигурация SM-02 на первом блоке:

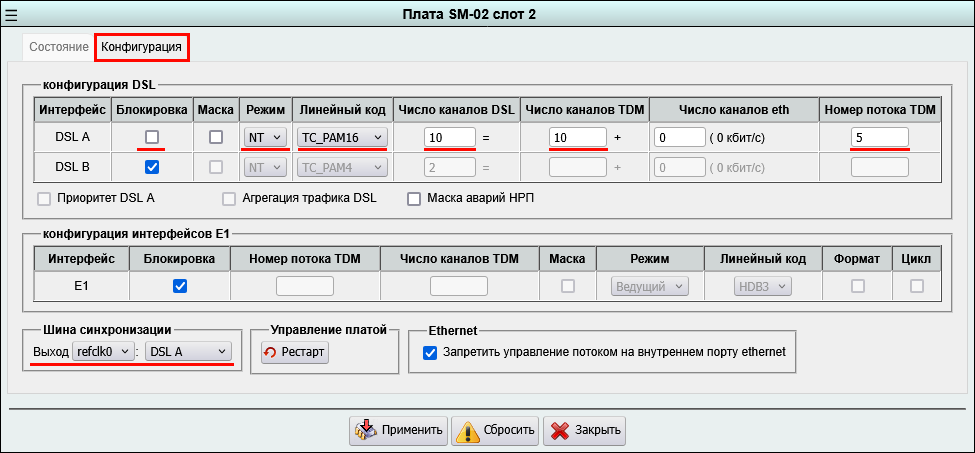
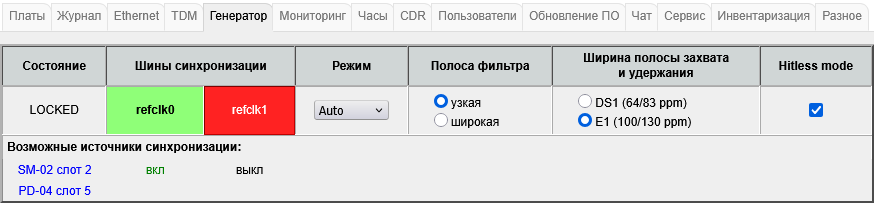
На SM-02 на втором блоке для «DSL A» вместо «LT» выбрать «NT»; в разделе «Шина синхронизации» для «refclk0» выбрать «DSL A» для синхронизации TDM от пары A. Остальные настройки аналогичны настройке SM-02 на первом блоке.
Важно, чтобы настройки «DSL A» на обоих блоках были одинаковыми (кроме режима).
Конфигурация SM-02 на втором блоке:

После выбора шины синхронизации второй блок через некоторое время захватит частоту от первого блока:

3. Коммутация TDM
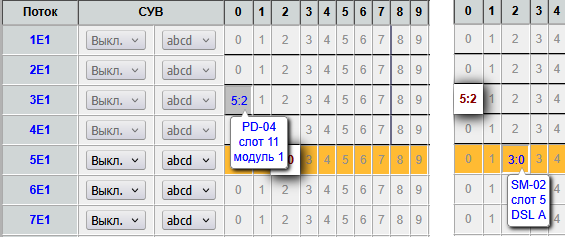
В таблице TDM надо скоммутировать канальный интервал, который занимает субмодуль R232 платы PD-04, и любой свободный канальный интервал в потоке E1, который занимает пара DSL A. КИ0 и КИ1 (в случае нецелого потока E1) или КИ16 (в случае целого потока E1) рекомендуется не занимать, поскольку в дальнейшем может потребоваться цикловая синхронизация или передача СУВ.
Таким же образом нужно скоммутировать канальные интервалы на втором блоке.

4. Проверка
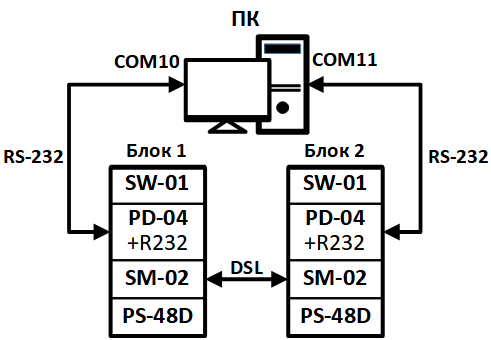
Для проверки будет использована следующая схема:

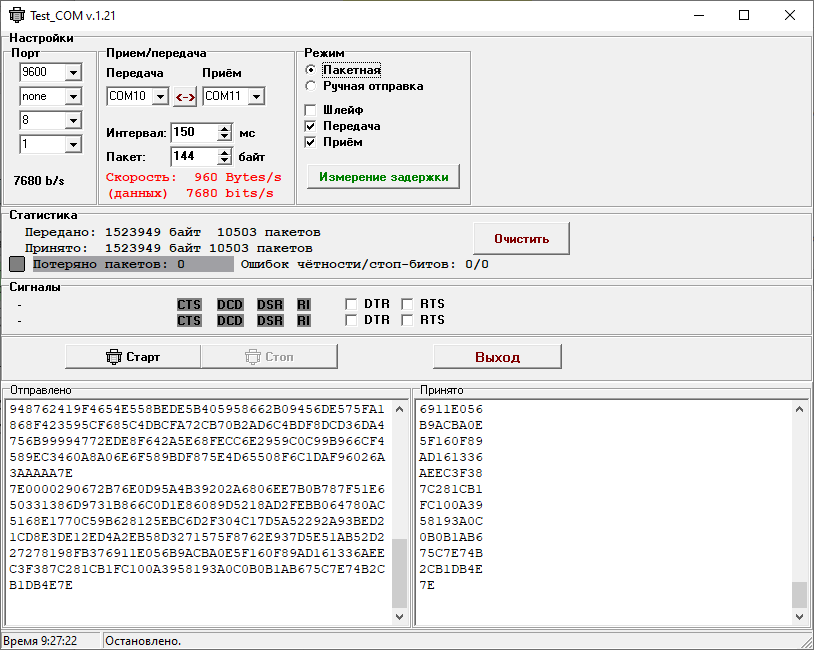
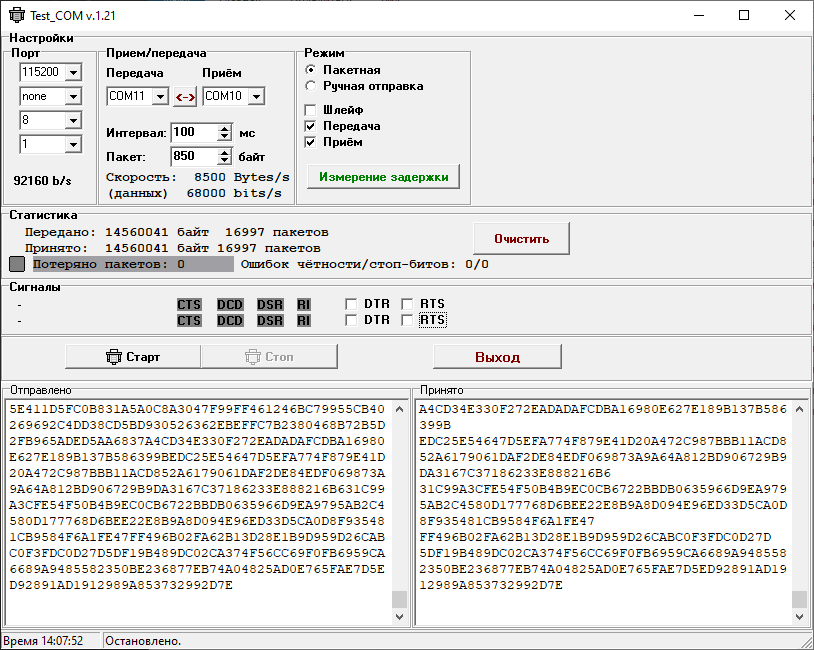
С помощью конвертеров Ethernet <--> RS485 подключим ПК к обоим портам плат PD-04, в которых установлены субмодули R232. Затем через программу генерируем и отправляем данные на порт платы PD-04 первого блока и получаем данные с порта платы PD-04 второго блока. После успешной проверки прохождения данных в одну сторону поменяем в программе направление данных в другую сторону (данные шли Блок 1 -> Блок 2, теперь Блок 1 <- Блок 2).
Как показано ниже, полученные данные соответствуют отправленным, число отправленных/полученных пакетов совпадает, ошибок не обнаружено.


Пример II
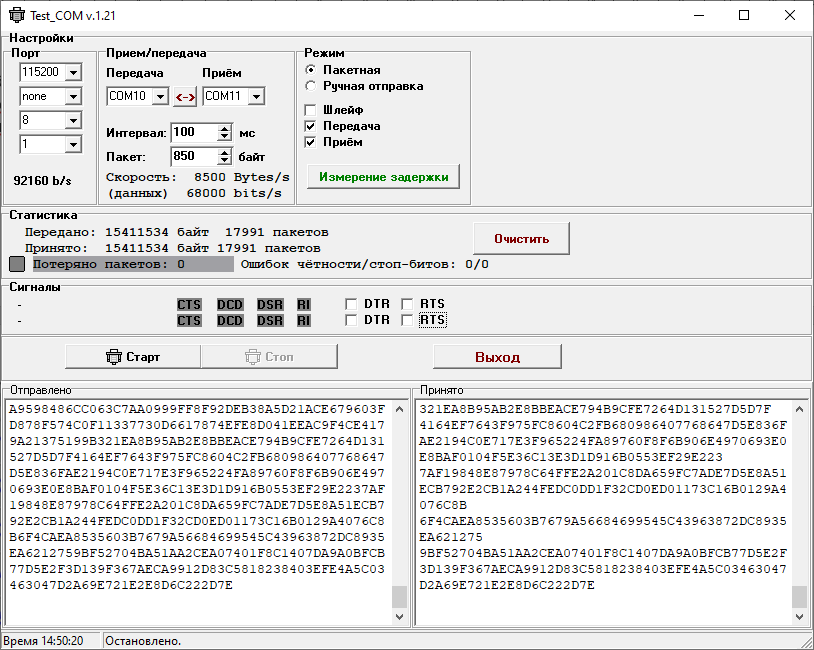
Рассмотрим случай, когда устройства телемеханики работают на скорости 115200 бод и не задействуют сигналы управления.
1. Настройка PD-04
В настройках PD-04 для субмодуля R232 нужно изменить «Скорость передачи» на «80-160 кбит/с (64 битовых интервала)», так как скорость устройств телемеханики изменилась и теперь соответствует скорости 115200 бит/с. В таблице TDM R232 будет занимать 8 канальных интервалов.

На плате SM-02 ничего менять не требуется, потому что в примере I мы настроили 10 канальных интервалов.
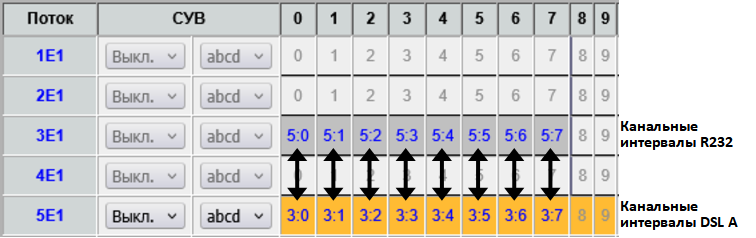
2. Коммутация TDM
В таблице TDM надо последовательно скоммутировать канальные интервалы, которые занимает субмодуль R232 платы PD-04, и канальные интервалы потока E1, который мы указали для DSL A.
Скоммутировать каналы аналогичным образом на втором блоке.

3. Проверка
Таким же образом проверим нашу схему, изменив скорость передачи данных.


Пример III
Рассмотрим случай, когда устройства телемеханики работают на скорости 115200 бод и задействуют аппаратные сигналы управления.
1. Настройка PD-04
В настройках PD-04 нужно установить галочку «Аппаратное управление», чтобы прозрачно передавать сигналы управления между устройствами.

На плате SM-02 ничего менять не требуется.
2. Коммутация TDM
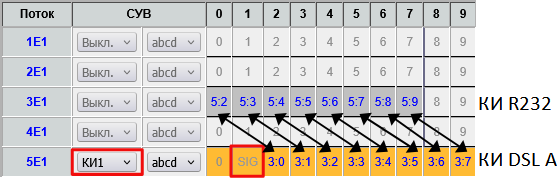
В таблице TDM в столбце «СУВ» надо выбрать КИ1, так как сигналы управления для RS-232 передаются в СУВ. КИ1 выбирается исходя из того, что мы передаем не целый поток E1, а 10 канальных интервалов, поэтому использовать КИ16 нельзя. После этого надо последовательно скоммутировать канальные интервалы, которые занимает субмодуль R232 платы PD-04, и свободные канальные интервалы потока E1, который мы указали для DSL A.

На втором блоке сделать аналогичные настройки.
После настройки обоих блоков можно проверить отправку и прием сигналов управления. В программе для COM10 установим галочки «DTR» и «RTS».

На PD-04, к которой подключен COM10, будет отображаться прием сигналов «DTR» и «RTS».

На PD-04, к которой подключен COM11, будет отображаться прием сигналов «DSR» и «CTS».

Так же сигналы проходят в другую сторону:



Attachments (21)
- 1-scheme.png (19.9 KB ) - added by 17 months ago.
- 2-conf_PD_1.png (23.4 KB ) - added by 17 months ago.
- 3-conf_SM_b1_1.png (41.1 KB ) - added by 17 months ago.
- 4-conf_SM_b2_1.png (40.4 KB ) - added by 17 months ago.
- 5-sync.png (23.5 KB ) - added by 17 months ago.
- 6-tdm1.png (30.7 KB ) - added by 17 months ago.
- 7-scheme.png (20.1 KB ) - added by 17 months ago.
- 8-test1.png (42.8 KB ) - added by 17 months ago.
- 9-test2.png (42.9 KB ) - added by 17 months ago.
- 10-conf_PD_2.png (23.4 KB ) - added by 17 months ago.
- 11-tdm2.png (77.5 KB ) - added by 17 months ago.
- 12-test3.png (50.6 KB ) - added by 17 months ago.
- 13-test4.png (51.7 KB ) - added by 17 months ago.
- 14-conf_PD_3.png (24.6 KB ) - added by 17 months ago.
- 15-tdm3.png (27.5 KB ) - added by 17 months ago.
- 16-test_com1.png (2.7 KB ) - added by 17 months ago.
- 17-PD_flow_control_b1_1.png (25.0 KB ) - added by 17 months ago.
- 18-PD_flow_control_b2_1.png (25.1 KB ) - added by 17 months ago.
- 19-test_com2.png (2.6 KB ) - added by 17 months ago.
- 20-PD_flow_control_b1_2.png (25.4 KB ) - added by 17 months ago.
- 21-PD_flow_control_b2_2.png (19.6 KB ) - added by 17 months ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip