#168 closed баг (invalid)
Отсутствует запись динамограммы при настольных экспериментах с контроллером
| Сообщил: | Art_M | Владелец: | |
|---|---|---|---|
| Приоритет: | средний | Этап разработки: | 2-я очередь |
| Ключевые слова: | Копия: | andrei |
Описание
smarthdc 1.0-r692
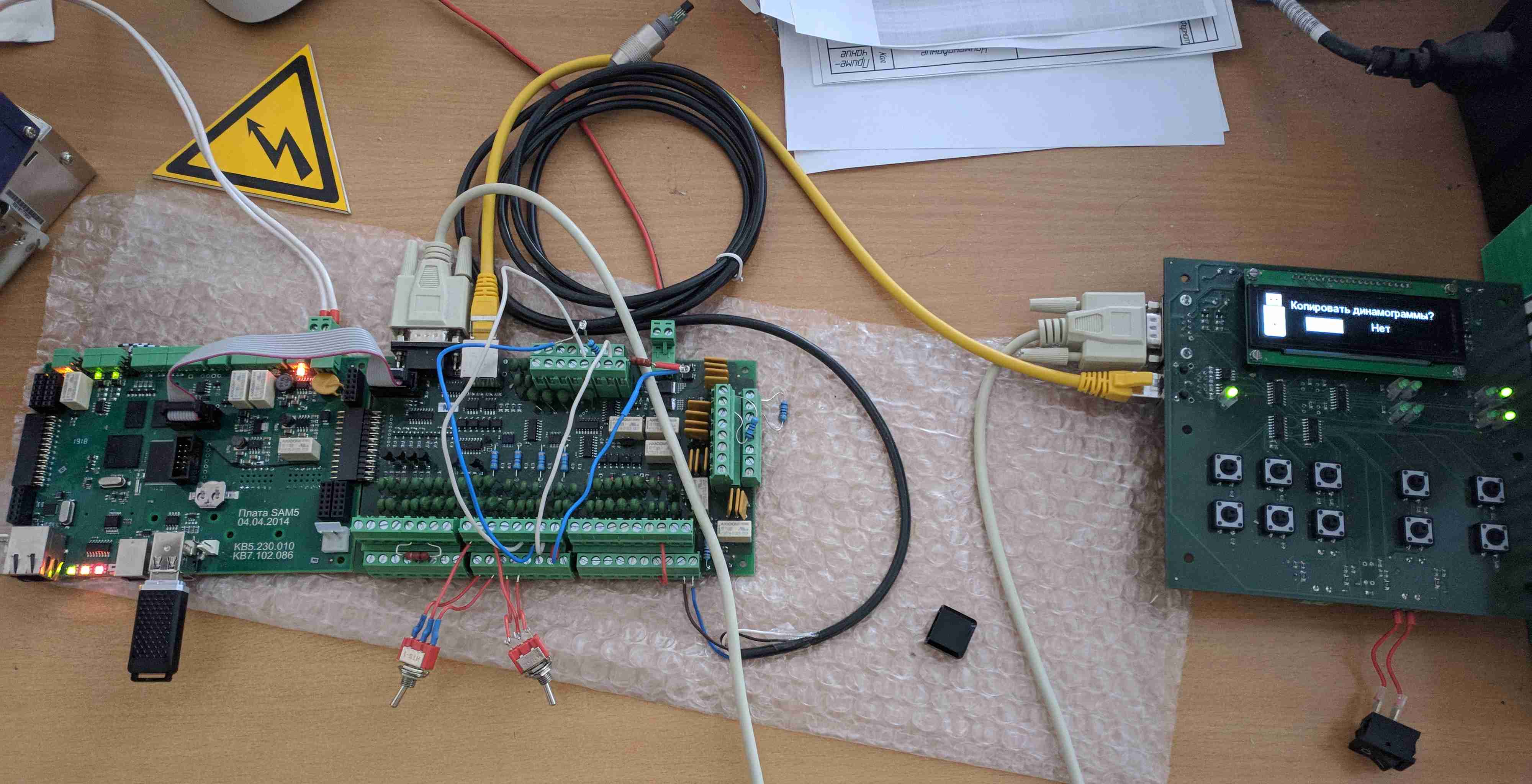
При проведении любых настольных экспериментов, имитирующих датчик давления и поочередное срабатывание датчиков положения в автоматическом режиме, отсутствует запись динамограммы. Состояние подключения периферии изображено на фото. Лог прилагаю. Это делает невозможным в настольных условиях проверить ПО функции, связанные с записью динамограмм.
Ожидалось, что динамограмма будет записываться и отображаться на дисплее, как это происходит в реальных условиях.
Вложения (2)
{kind=link}
{kind=link}
История изменений (10)
by , 7 лет ago
| Вложение: | Подключение периферии.jpg added |
|---|
by , 7 лет ago
| Вложение: | -ABCD1234567.rar added |
|---|
следующий: 3 comment:2 by , 7 лет ago
Replying to san:
Динамограмма будет записываться только если привод "движется" вверх и вниз. Движение вверх определяется по частоте вращения, считанной из ЧРП. Так как у тебя ЧРП нет, динамограмма не будет писаться.
Возникает вопрос, при потере связи по модбас, кратковременной или продолжительной, как будет себя вести запись динамограммы?
comment:3 by , 7 лет ago
Replying to Art_M:
Возникает вопрос, при потере связи по модбас, кратковременной или продолжительной, как будет себя вести запись динамограммы?
Если связь пропала в момент движения вверх (когда двигатель вращался), контроллер будет продолжать считать, что происходит движение вверх, пока очередной запрос ЧРП не оукажется успешным и не покажет, что скорость равна нулю. Соответственно, все измерения нагрузки будут писаться в массив движения вверх. Если число значений массива движения вверх превысит 2304, динамограмма будет помечена как испорченная и будет отброшена (игнгорирована).
Если связь пропала во время движения вниз, и хотя бы один электроклапан разрешен и исправен, текущая динамограмма будет записана как обычно, так как ход вниз определяется по клапану. Если же станция работает без клапанов, то движение вниз определяется по отсутствию вращения двигателей, и ситуация аналогична ходу вверх: пока не будет получен успешный ответ от ЧРП, говорящий, что двигатель вращается, контроллер будет продолжать считать, что выполняется движение вниз, и, соответственно, писать нагрузку в массив движения вниз. Если массив переполнится (больше 2304 отсчетов), динамограмма будет помечена как испорченная.
comment:4 by , 7 лет ago
| Решение: | → invalid |
|---|---|
| Состояние: | new → closed |
Replying to san:
Это не баг, рекомендую переформулировать в улучшение.
Не думаю, стоит это делать. Улучшение - это когда вносится какое-то изменение/дополнение на постоянной основе, улучшающее штатную работу устройства (нашей станции). Здесь же, насколько я понимаю, речь идет об имитации наличия ЧРП для проведении каких-то тестов, по окончании которых эта имитация будет более не нужна, и, соответственно, никак не улучшит реальную работу. Будет лучше если такая модификация не будет вноситься в отновную ветку кода, вместо этого лучше сделать отдельную разовую тестовую версию программы под конкретные эксперименты.
А этот тикет я закрываю.
следующий: 6 comment:5 by , 7 лет ago
| Копия: | added |
|---|
разовую тестовую версию программы под конкретные эксперименты
Артём как раз хочет испытывать наше ПО на стенде.
Улучшение - это когда вносится какое-то изменение/дополнение на постоянной основе, улучшающее штатную работу устройства
Насколько я телепатировал Артёма, ему не нравится, что согласно ТЗ, ДГ при движении вверх пишутся только при крутящемся двигателе, он видит в этом существенные недостатки и хочет предложить изменить ТЗ.
Кстати Андрей как-то тоже поднимал такой вопрос, добавлю его...
comment:6 by , 7 лет ago
Replying to san:
Насколько я телепатировал Артёма ... он... хочет предложить изменить ТЗ.
Насколько я знаю, для предложений изменений в ТЗ Артему открыт доступ в ТЗ на google drive. Здесь же, грубо говоря, "баг" означает нарушение станцией какого-то требования ТЗ. В данном случае поведение контроллера станции требованиям ТЗ соответствует, поэтому я и закрыл тикет.
следующий: 8 comment:7 by , 7 лет ago
Артем, нужно сделать запись ДГ не зависимо от ответа ЧРП?
Т.е. посылаем команду "вверх" - пишем ДГ, так?
Видимо это нужно было учесть когда перешли на дискретное управление.
P.S.: Лирическое отступление. Артем, если в тикете не указываешь владельца, то добавляй нас в поле "копия".
comment:8 by , 7 лет ago
Replying to andrei:
P.S.: Лирическое отступление. Артем, если в тикете не указываешь владельца, то добавляй нас в поле "копия".
Продолжение отступления: может просто сделать тебя как руководителя проекта владельцем тикета по умолчанию? Тогда пользователям не придется выполнять лишних действий...
Динамограмма будет записываться только если привод "движется" вверх и вниз. Движение вверх определяется по частоте вращения, считанной из ЧРП. Так как у тебя ЧРП нет, динамограмма не будет писаться.
Это не баг, рекомендую переформулировать в улучшение.